在 92 klux 强背景光下,SPAD阵列还能可靠提取ToF信号吗?
2026-02-03 13:16:20, 光电传感器量测 光焱科技股份有限公司



一、研究成就与核心创新

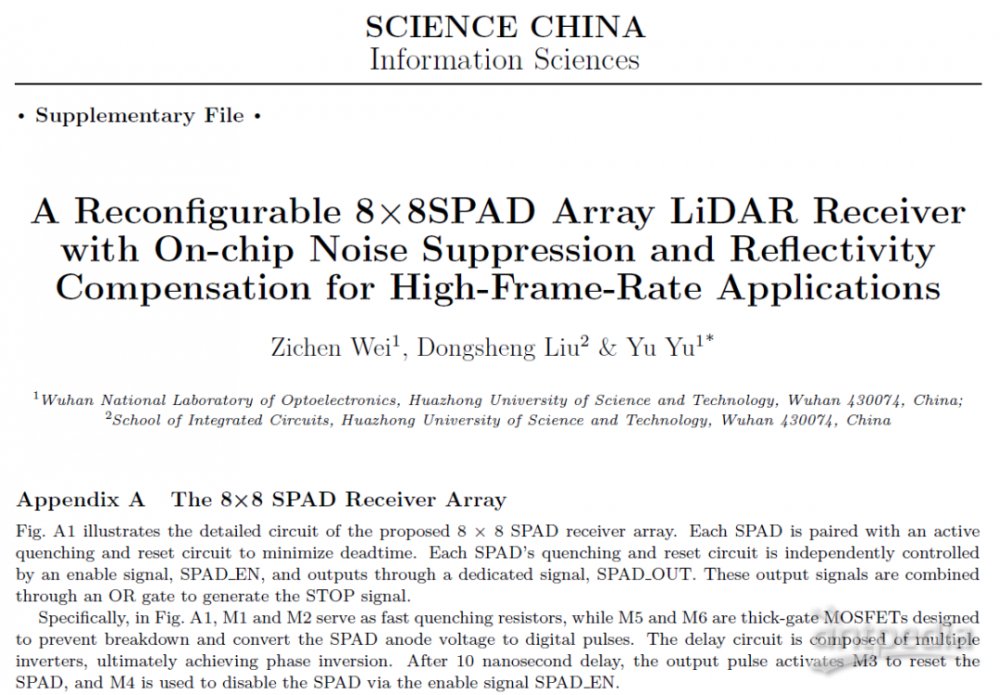
华中科技大学武汉光电国家研究中心团队成功研制出基于180 nm BCD工艺的单芯片集成8×8单光子雪崩二极管(SPAD)阵列接收器,为高性能激光雷达(LiDAR)提供了突破性解决方案。
核心技术亮点:
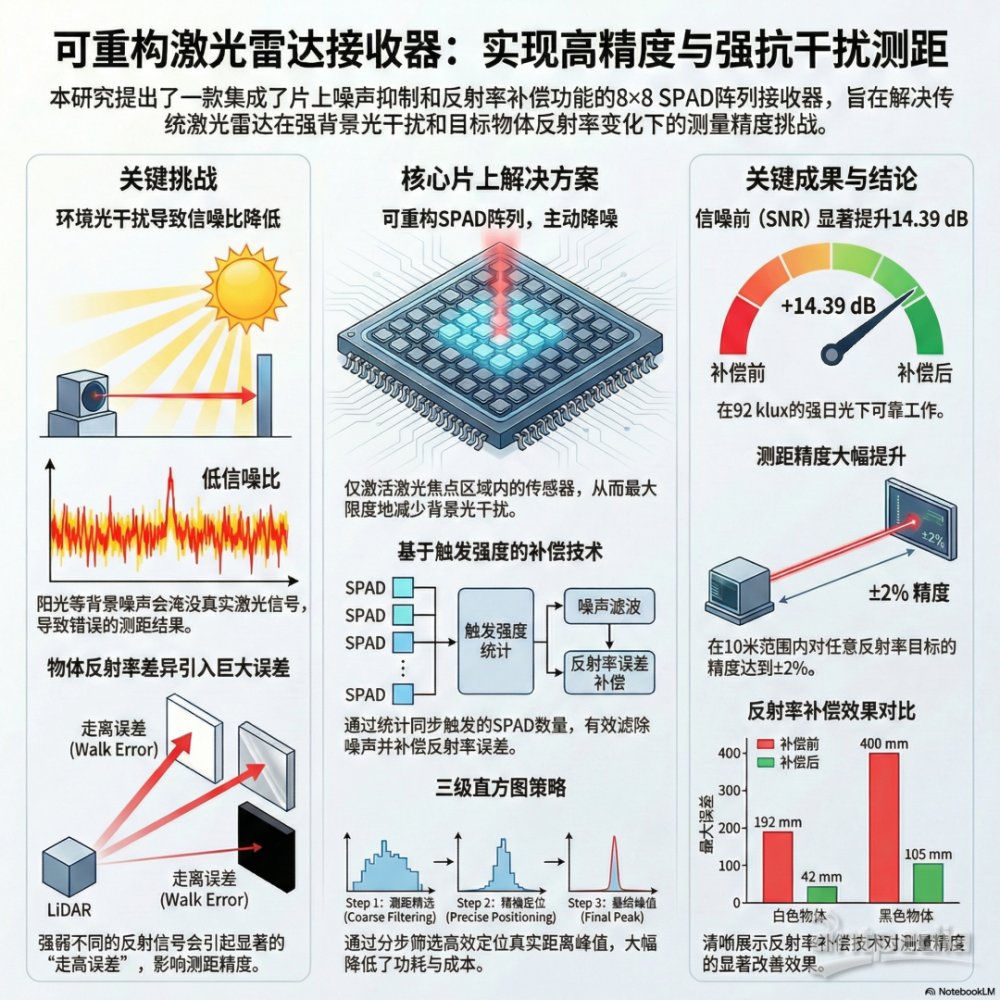
1.动态可重构性:通过独立使能控制信号(SPAD EN),传感器活跃区域可动态匹配激光光斑,从源头滤除光斑外的背景噪声。
2.首创脉冲计数反射率补偿:针对SPAD阵列信号汇聚导致的"走动误差"(Walk Error),首次利用触发脉冲数量估算目标反射率并进行线性补偿,将测距误差从60 cm以上降至±2%以内。
3.高效三阶段直方图策略:创新的算法将RAM资源消耗降低37.5%,同时支持高达10 kHz的测距速率。
4.显著的信噪比提升:通过多回波记录与光子符合检测技术,在92 klux强背景光环境下实现14.39 dB的SNR提升。
二、研究团队:
通讯作者余宇教授,第一作者魏子琛,团队长期致力于硅光子集成、光通信及高性能传感器设计。
三、技术背景:LiDAR面临的核心挑战

基于飞行时间(ToF)原理的SPAD阵列接收器在实际应用中面临三大瓶颈:
(1)背景光噪声与光子堆积
即使使用窄带滤光片,太阳光仍会频繁触发SPAD。在强光下,首个触发光子往往来自噪声而非激光回波,这种"光子堆积"效应会严重遮蔽真实ToF峰值,导致系统误判目标距离。
(2)多信号汇聚的非线性时延
SPAD阵列通常采用OR门树状结构汇集触发信号。当多个SPAD同时触发时,多路放电电流加速节点电荷排放,导致信号翻转时间发生变化。
高反射率物体触发SPAD数量多、时延短;低反射率物体则相反。这种由反射率差异引起的走动误差可能超过60 cm,严重影响测距精度。
(3)硬件资源与帧率的权衡
高分辨率(31.25 ps LSB)直方图需要庞大的存储资源(BIN),在片上系统中造成巨大的面积与功耗压力,限制了帧率提升。
四、创新解决方案:从硬件到算法的系统优化
1. 动态可重构传感阵列
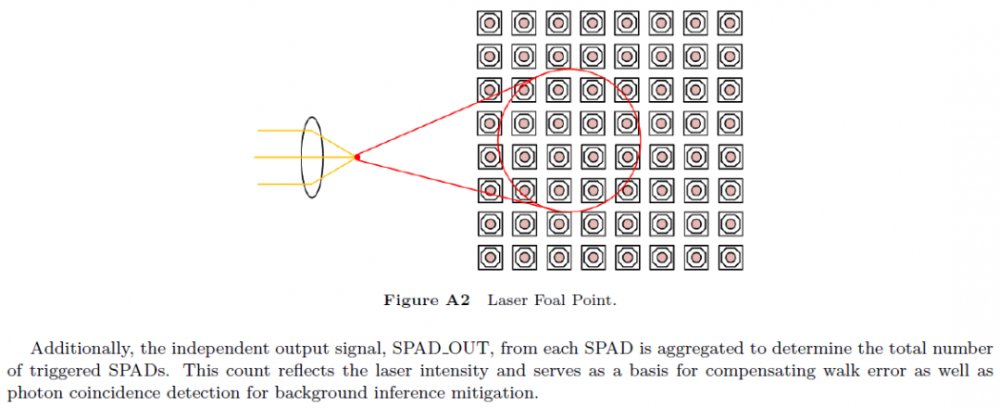
为8×8阵列中的每个SPAD设计独立使能控制信号,根据光学系统的光斑位置动态关闭光斑外的SPAD单元。
实验证实,在64个SPAD中仅有25个位于有效光斑内,禁用其余单元后噪声性能显著优化。
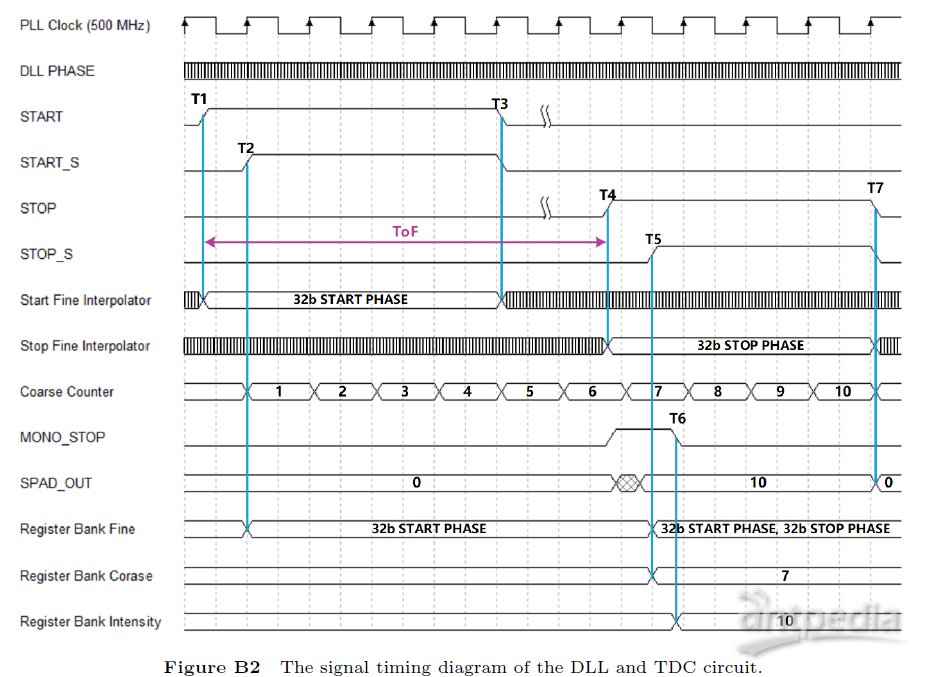
2. 具备强度感知能力的多回波TDC
开发高时间分辨率(31.25 ps LSB)的时间数字转换器(TDC),创新之处在于同时记录多个回波的ToF数据与SPAD触发数量。
通过记录触发数量,系统可有效估算反射率,为走动误差线性补偿提供关键依据。
3. 三阶段部分直方图策略
放弃传统全量直方图,将14-bit ToF数据分为5-bit、5-bit与4-bit三个片段,循序渐进锁定峰值BIN地址。
该方法在保持精度的同时,将RAM资源消耗降低37.5%。
4. 光子符合检测与强度过滤
利用激光脉冲的时间相关性,TDC采集2 ns内(对应激光脉宽)的触发总数。
若触发数量低于设定阈值,则判定为背景随机噪声并过滤,显著提升信噪比。
五、关键实验结果
(1)SPAD器件级性能
.击穿电压(BDV):约20 V
.暗计数率(DCR):1.4 kcps(5 V过驱动电压)
.光子探测概率(PDP):6%(905 nm波长)
(2)TDC电路性能
.分辨率(LSB):31.25 ps
.微分非线性(DNL):±33 ps
.积分非线性(INL):+45.631 ps至-92.302 ps
(3)强背景光抗干扰能力
在92 klux强阳光环境下:
.传统单回波方案SNR仅为-11.36 dB,导致测距失效
.应用符合过滤后,SNR提升14.39 dB至3.03 dB,成功提取目标峰值
(4)反射率补偿效果(核心突破)
.补偿前:高反射率白色目标最大误差192 mm;低反射率黑色目标远距离误差高达400 mm
.补偿后:白色目标误差降至42 mm,黑色目标降至105 mm
.系统表现:10米测距范围内误差控制在±2%以内
(5)系统级综合规格
.测距速率:硬件支持10 kHz,实验室演示为1,000 fps
.最大测距距离:白色目标15 m,黑色目标10 m
.芯片尺寸:1.7 mm × 1.8 mm(180 nm BCD工艺)

推荐使用光焱科技SPD2200
商用级SPAD单光子雪崩二极管效率整合型测试仪
六、技术意义与产业价值

学术贡献:
1.架构创新:三阶段直方图策略为高分辨率面阵SPAD接收器提供了重要的架构参考,在资源受限的片上系统中实现高性能测距。
2.误差校正突破:不同于以往研究聚焦于提升SPAD灵敏度,本研究深刻洞察OR门汇聚造成的走动误差,首次提出基于触发脉冲计数的线性补偿方法,大幅提升LiDAR对异质目标物的检测一致性。
3.抗干扰能力:可重构使能控制与多回波符合检测技术的结合,使芯片在92 klux强背景光下仍能稳定运作。
七、产业意义:

对于从事硅光子集成与光电集成电路(EPIC)设计的工程师,该研究展示了BCD工艺在光电传感领域的强大潜力。
通过将复杂的数字信号处理(DSP)逻辑与高压雪崩二极管整合在同一硅基片上,有效降低了系统级封装(SiP)的复杂度与延迟。
其10 kHz的硬件运算能力,为实现高帧率3D成像与自动驾驶避障提供了关键技术支撑。
工业应用前景:
该技术为低成本、高性能的单点及扫描式LiDAR开发提供了坚实基础,
特别适用于:
1.自动驾驶车辆的环境感知系统
2.机器人导航与避障
3.工业自动化中的高精度测距
4.三维成像与地形测绘
八、结语
华中科技大学团队通过电路与算法的协同设计,系统性解决了SPAD接收器在实际应用中的走动误差与噪声抑制两大难题。
该研究不仅是学术上的创新突破,更为工业界开发下一代高性能LiDAR系统提供了完整的技术路径与实验验证,标志着单芯片集成SPAD接收器技术迈入新的里程碑。


02-02 瑞莱谱医疗
H.E.L 微反应-绝热加速量热仪Phi-TECⅡ02-02 H.E.L Group
课表一览 | 2026哈希技术培训强势焕新,精准赋能,驾驭未来02-02 哈希公司
04_高分辨质谱不要只盯质量精度,即使质量精度低于 1 ppm 仍不足以确定未知物的分子式02-02 绿绵科技
中奖公布|微官网宠粉留言获奖名单揭晓01-30 珀金埃尔默
默存课堂 | QSight三重四极杆液质联用系统全方位应对食品中PFAS的分析01-30 珀金埃尔默
中图仪器2026年新年晚会圆满举办01-30 CHOTEST
Arrayjet生物芯片点样仪可助力适配体小分子靶点的高通量筛选01-30 环亚生物
ArrayJet生物芯片点样仪助力流感型肺炎靶点筛选01-30
ArrayJet生物芯片点样仪助力SARS-CoV-2与甲型流感病毒感染的体液免疫差异化研究01-30
ArrayJet高通量生物芯片点样仪协助海洋病原微生物快速检测方法的建立01-30
【仪电分析】烟用纸张中溶剂残留的测定——顶空气相色谱质谱法01-30 INESA仪电分析
美诺商用“小巨人”系列 商用洗衣新标杆01-30
新品发布 | 安东帕发布全球首款无汞式孔径分析仪PoreMaster eGaIn加注站,开启绿色实验室新篇章01-30 Anton Paar China
标准解读 | 布拉本德Farinograph 粉质仪国家标准及国际标准中的测试方法解读01-30 Anton Paar China
双重福利 | 国科仪器启航“SAXS/XRD系列仪器免费测样”专项活动01-29
氘代成像(DMI)给肿瘤贴上标签——让化疗疗效“看得见”01-29 核磁同位素学社
基于扫描电子显微镜(SEM)的法医学分析:枪击残留物及其他物证01-29 牛津仪器
全流程一体化多农残筛查解决方案01-29 飞飞
一次进样,同时搞定靶向 + 非靶向 代谢组学!01-29 飞飞