自适应光学教程
2023-02-16 09:10:15, 韵翔光电 江阴韵翔光电技术有限公司


可变形反射镜
我们的Multi-DM微机械可变形反射镜系统增强了光学控制。这些反射镜能够改变形状以校正非常大的入射波前失真。由于微机电(MEMS)可变形反射镜的通用性、成熟技术以及它们可提供的高分辨率波前校正,它们目前广泛使用于波前塑形应用等技术中。
压电可变形反射镜
Thorlabs的压电可变形反射镜用于校正非常大的波前畸变。该可变形反射镜非常适合于校正由波前像差的常见来源导致的失真,比如像散和彗差,并且包含一个单独的机制用来调节俯仰和偏转。
Shack-Hartmann波前传感器
Thorlabs提供两种传感类型的Shack-Hartmann波前传感器:CMOS和CCD。我们的CMOS传感器能够提供最快1120 Hz的帧速(取决于微透镜阵列),精确测量波前形状和光束的强度分布。我们的CCD相机仅在AO套件中提供,相机具有130万像素的分辨率。这些波前传感器可选择镀铬的微透镜阵列,用于300 - 1100 nm,或镀增透膜的微透镜阵列,用于400 - 900 nm。前者的微透镜间距为150 µm,而后者的微透镜间距为150或300 µm。这些选项方便终端用户选择能够提供高空间分辨率、增强对比度或高波前准确度的系统。
自适应光学元件套件
每个Thorlabs的自适应光学元件(AO)套件是提供全套的自适应光学元件成像解决方案,包括一个可变形反射镜、波前传感器、控制软件和光机械组件,用于组装。这些精密波前控制装置可用于光束塑形、显微、激光通信和视网膜成像以及教学演示。



自适应光学(AO)是一个快速增长的多学科领域,包括物理、化学、电子和计算机科学。AO系统用于校正(形成)一束光的波前。历史上,该系统起源于天文学和国防,它可产生高分辨率的天文图像;更清晰的图像产生对比度的额外增益,这对天文学家也有好处,因为这意味着他们可以探测到其他方法无法观察到的暗淡的天体。当天文学家在努力克服大气湍流的模糊效应时,国防承包商们却关心如何保证他们的高功率激光器的光子可正确导向,从而击毁战略目标。最近,由于在AO组件的精密度和简单化方面的改进,研究人员已经利用这些系统在飞秒脉冲整形、显微镜、激光通信、视力矫正以及视网膜成像等领域取得突破。虽然这些领域相差很大,由于不需要的时变效应的存在,这些领域都将从自适应光学系统中受益。

通常,AO系统由3部分组成:(1)波前传感器,用于测量波前偏移,(2)可变形镜片,可改变形状以校正高度畸变的波前,及(3)实时控制软件,用波前传感器收集到的信息计算可变形镜片应该采用的合适的形状,以抵消畸变的波前。这三个组件以闭环的方式操作。这意味着由AO系统导致的任何变化都可以由该系统检测。原则上,这种闭环系统基本上是简单的;它测量相位,相位与研究中的光学波前位置呈函数关系,确定其像差,计算校正,对可变形反射镜重新塑形,观察校正结果,然后如果相位像差随时间变化,那么按需要一次又一次重复这个过程。通过这个过程,AO系统能够从被成像的光的波前消除像差,改善图像的光学分辨率。
波前传感器在自适应光学系统中的作用是测量波前与参考波前间的偏差。波前传感器可有三个基本配置:Shack-Hartmann波前传感器,剪切干涉仪和曲率传感器。每个在噪声、精度、灵敏度以及便于与控制软件和可变形镜片之间的连接等方面有其自身的优势。其中,Shack-Hartmann波前传感器的应用最为广泛。波前传感器使用微透镜阵列将入射光束分成一系列较小的光束,每一束都在一个放置在小透镜阵列焦平面上的CCD摄像机上成像。如果一个均匀平面波入射到Shack-Hartmann波前传感器(参考图1),将沿每个微透镜单元光轴产生一个聚焦光斑,在焦平面上产生规则排列的光斑栅格。但是,如果是扭曲的波前(即任何非平面波前),焦点将偏离微透镜单元的光轴。每个光斑圆心偏离的距离与小透镜位置的波前斜率成正比。波前相位可以根据获得的光斑偏移信息(在一个常数范围内)再构(见图2)。

图1. 当平面波前入射到Shack-Hartmann波前传感器的微透镜阵列时,CCD传感器上的光成像将显示为规则的光斑珊格。但是,如果波前有像差,每个光斑将偏离其微透镜光轴;如果位移足够大,像点甚至可能消失。这些信息用来计算微透镜阵列上入射光波前的形状。

图2. 图示两个Shack-Hartmann波前传感器的屏幕解图:光斑区域(左侧框架)和基于该光斑区域信息(右侧框架)计算的波前。

图3. 动态范围和测量灵敏度是Shack-Hartmann 波前传感器两个相互矛盾的属性。
这里,f,Δy和d分别代表微透镜的焦距,光斑偏移和微透镜直径。可通过小角度近似方程得到测量灵敏度θ min 和动态范围θmax。θ min 是最小波前斜率,可以通过波前传感器测量。最小探测点位移Δymin取决于光电探测器像素的大小、质心算法的精确度和传感器的信噪比。θmax是波前传感器可以测量的最大波前斜率,对应于光斑偏移Δymax,等于微透镜直径的一半。因此,增加灵敏度会降低动态范围,反之亦然。
极大地影响Shack-Hartmann波前传感器的性能的四个参数是微透镜数量(或微透镜直径,范围通常为〜100 – 600微米)、动态范围、测量灵敏度和微透镜阵列的焦距(典型值范围从几毫米到30毫米)。微透镜数量限制了泽尼克系数(一种可以精确计算的重构算法)的最大数量;研究发现:用于表示原始波前系数的最大值大约与微透镜的数量相同。选择所需微透镜的数量时,必须考虑其试图模拟的失真的数量(即有效地表示真正波前像差需要的泽尼克系数是多少)。对于测量灵敏度θmin和动态范围θmax,这些参数相互抵触(见右图3)。前者决定可以检测的最小位相,而后者则决定可以测量的最大位相。
Shack-Hartmann传感器的测量精度(即可以准确测量的最小波前斜率)取决于其精确测量聚焦光斑相对于参考位置的位移,参考点位于微透镜的光轴上。如果光斑部分重叠,或者微透镜的焦点落在传感器的探测区域之外(即光斑交叠),常规算法将无法确定正确的光斑圆心。特殊算法可以克服这些问题,但他们限制了传感器的动态范围(即能够精确测量的最大的波前斜率)。系统的动态范围可以通过使用大直径或短焦距的微透镜增加。然而,微透镜的直径与所需泽尼克系数有关;因此,增加动态范围的唯一方法是缩短微透镜焦距,但这反过来又降低了测量的灵敏度。理想情况下,选择最长焦距的透镜可满足动态范围和测量灵敏度要求。
Shack-Hartmann波前传感器可以提供强度分布信息以及计算波前。注意不要混淆这些。图4的左侧显示了强度分布的示例,而右侧显示相应的波前轮廓。可通过不同的波函数分布获得相同的强度分布。

图4. Shack-Hartmann波前传感器提供的几条信息,包括关于每个微透镜的总功率和计算的波前分布信息。这里,左侧框架显示为示例强度分布,右侧框架显示为相应的波前。
可变形镜片(DM)的形状会根据位置命令发生变形,以补偿Shack-Hartmann波前传感器(参考像差标签了解更多有关DM可校正像差的信息)测量的像差。理想情况下,它会假设表面形状与像差轮廓共轭(见图5)。在许多情况下,表面轮廓由根据外加电压移入或移出的底层驱动器控制。可变形镜片有几个不同的类型,但两个最流行的类型分别是分段的和连续的(见图6)。分段式镜片由可以向上和向下移动(如果每个段是由单个驱动器控制),或者有翻转、倾斜和活塞运动(如果每个部分通过三个驱动器控制)的独立平段组成。这些镜片通常用于全息或空间光调制器。这种配置的优点包括制造各段达到紧密度容限的能力,消除DM相邻段之间的耦合(各个部件独立运动),以及每段自由度的的数量。然而,从另一方面来说,各段间规则的空间间隔表现为一个衍射图样,从而将衍射模式引入光束。此外,分段镜片比连续反射镜需要更多的驱动器以弥补失真的输入波前。为了解决分段变形反射镜的光学问题,我们制造了连续面板变形反射镜(如我们AO套件包括的)。他们提供了一个比分段变形镜更高的填充因子(即实际反射的百分比)。然而,其缺点是驱动器是机械耦合的。因此,当一个驱动器移动时,沿镜片的整个表面会产生有限的反应。移动其中一个驱动器造成的二维表面形状称为该驱动器的影响函数。通常情况下,连续DM的相邻驱动器的移动高度为驱动高度的10-20%;这一比例即驱动器耦合。请注意:分段模式DM虽然具有零耦合但不一定是可取的。

图5. 平面镜和MEMS变形镜片的像差补偿能力进行了比较。

图6. BMC系列连续(左)和分段(右)MEMS变形反射镜的主要组成部分截面图。
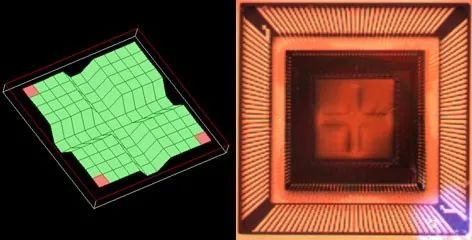
图7. 通过施加电压DM表面产生一个交叉状图形,该电压是包括阵列中间两行和中间两列的44个驱动器最大偏转所必需的。
左图显示了描述DM表面的AO套件软件的屏幕截图,而右图是通过半暗场照明获得的,显示了编辑这些设置时实际的DM表面。需要注意的是用于照明的白光光源在照片右下角可见。
左图显示了包括自适应光学套件的DM 12 ×12驱动器阵列上的交叉屏幕截图。为了生成此屏幕截图,在中间两行和中间两列的驱动器上施加的电压引起镜片膜的全偏转。除了软件的屏幕截图描绘了DM的表面,编写这些设置时,半暗场照明也用来获得实际DM表面的图像(见右图)。
在自适应光学系统中,控制软件是波前传感器和变形镜片之间的重要纽带。它将波前传感器的电信号(与波前斜率成正比)转换为发送到DM各驱动器的补偿电压命令。自适应光学系统的闭环带宽直接关系到该计算完成的速度和准确性,但在一般情况下,这些计算必须在比像差波动更短的时间内发生
从本质上讲,控制软件使用光斑区域偏差再构光束的位相(这种情况下使用Zernike多项式),然后将共轭命令发送给DM。最小二乘拟合法用于计算波前相位以确定最终为用户输出有效的Zernike多项式数据。尽管不是唯一可能的形式,Zernike多项式提供了一个独特而便捷的方式来描述光束相位。这些多项式在单位圈内形成一个正交基组,以不同形式表示离焦、倾斜、像散、彗差等标准;将多项式归一化使每个参数的最大值(活塞参数除外)为1,最小值为-1,表面平均值始终为零。此外,不会有任何两个像差叠加至第三项上,因而无需对显示的象差类型产生疑问。

04-15 公路部
创新2024 | 无氯仿提取RNA,让科研更安心!04-15 赛默飞生命科学
创新2024 | 细节决定成败:RNA实验中RNase防控要点全解析04-15 赛默飞生命科学
创新2024 | 告别低效转染,Neon NxT电转染系统为科研创新加速!04-15 赛默飞生命科学
探秘创新之旅,赛默飞“灵感”系列笔记本助力发展新质生产力,好礼等你来拿!04-15 赛默飞生命科学
创新2024 | 革命性突破!Bigfoot流式细胞分选仪:单细胞组学研究的创新引擎04-15 赛默飞生命科学
【新品上市】1.8μm BioCore Glycan糖型分析色谱柱04-15
塑料实验室光源暴露试验荧光紫外灯方法04-15
浙江万马高分子材料集团有限公司对我炭黑含量测试仪认可04-15
感谢安徽工程大学对我司同步热分析仪的认可04-15
聚碳酸酯PC再生塑料性状及性能要求04-15
奖品更多?名额增加?色谱能力验证大赛第二届来袭!04-15 市场宣传部
【展会预告】第25届中国环博会04-15 元析仪器
元析仪器 | 2024德国慕尼黑分析生化博览会圆满落幕04-15 METASH
为什么质粒的合规是CAR-T细胞药物合规的起点?04-15
【新品上市】Dynamica新品台式离心机V18R Plus重磅上市04-15 天美生化
兰友科技挂牌“专精特新”专板04-15
科学仪器第三方测试、可靠性工程与技术就绪度评估培训通知04-13
中国科学院昆明动物研究所党委书记施鹏带队赴华仪宁创考察交流04-13
化繁为简 | 维生素D检测“POCT”模式新体验04-12 Chromai IVD