【科普贴】ISO 6892-1:2016金属材料室温拉伸测试白皮书
2024-01-26 16:49:53 英斯特朗(上海)试验设备贸易有限公司
2016年7月,ISO国际标准委员会对ISO 6892-1进行了更新,该标准规定了金属材料在常温环境下的拉伸测试的方法。英斯特朗加入ISO标准制定委员会,以确保我们的产品符合要求,我们的团队熟知标准变更及变更后所产生的影响。
有哪些变化
ISO 6892-1:2016 将方法A细分成两个独立的方法,即方法A1(闭环应变控制)和方法A2(恒定横梁位移速率控制)。
在ISO 6892-1:2016 中,方法A为推荐方法,而目前所熟知的基于在拉伸测试的弹性区域内保持一个应力速率的测试方法,则成为方法B。
ISO 6892-1:2016将大大促进传统实验室的测试方法从方法B到过渡到方法A,同时监控试样的应变速率,方法A1旨在尽量减少试验速率的变化,以避免测试过程和试验结果的不确定性。选择方法A1,应变控制在明显提高测试效率的同时,也大大降低了不同设备不同实验室之间的测试结果的差异。
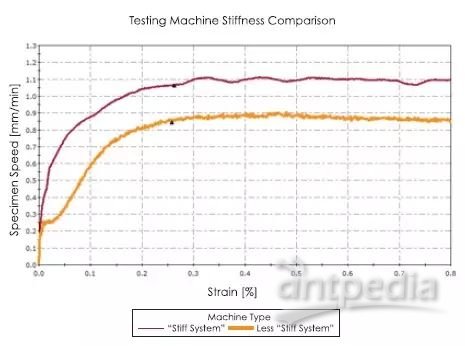
在拉伸测试期间,存在许多由不确定因素造成的误差,而保持应变速率能够消除设备的刚度/柔度对结果的影响。
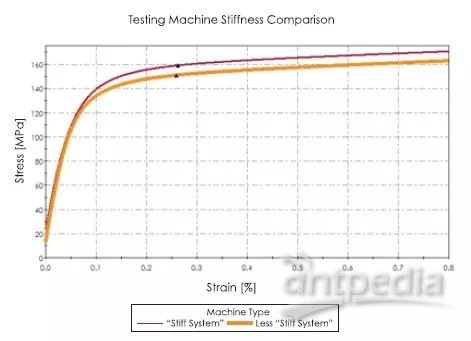
图1 试验机刚度对比--在两台不同的设备上进行,但采用相同的测试材料和横梁位移速率
方法A1与A2速率
ISO 6892-1:2016中定义的速率与ISO 6892-1:2009中方法A的相同。图3显示了ISO 6892-1对应变速率范围的定义。测量屈服(Rp)时推荐使用范围2的速率,而测量Rm、Agt、Ag、At和A时推荐选用范围4 的速率。图4显示了确定这些计算和应变速率范围与曲线对应的位置。
方法A1:基于引伸计反馈的闭环控制应变速率,具有严格的±20%的公差。
方法A2:“开环”恒定横梁位移速率(横梁位移速率=应变速率x平行长度)。
该计算未考虑试验机柔度的影响。如图2所示,系统中的某些应变速率将会“损失”。ISO 6892-1:2016的附录F给出了“考虑试验机刚度(或柔度)后估算的横梁位移速率”的指南。
图3 范围1:0.00007s-1 ± 20%
范围2:0.00025s-1 ± 20%(推荐)
范围3:0.002s-1 ± 20%
范围4:0.0067s-1 ± 20%(推荐)

图4 ISO 6892-1:2016方法A速率—要求的结果对比图
方法A1 应变控制
对于从弹性段平滑过渡到塑性段的金属材料,其标距段的应变分布从偏移屈服(Rp)到抗拉强度(Rm)的范围是均匀的。在此情况下,可以采用引伸计的信号来实现应变控制。由于控制环路受到试样刚度的影响,对引伸计的反馈进行控制的挑战在于要求进行调谐(通常用于“PID ”增益设定)。这样可能耗费时间,并且需要经验丰富的操作员。对于每一种被测试的材料,都可能需要进行微调。如果针对弹性阶段进行调谐,当试样屈服时,其刚度变化可能会影响控制,使得应变速率超过±20%的公差。测试系统的每一个方面都会影响到应变控制的适用性,包括试验机刚度、载荷传感器刚度,甚至试样夹持力度。
应变控制不适用于有屈服点延伸率的金属(YPE/Ae),因为沿平行长度的应变分布不再均匀。取而代之的是,局部区域出现的吕德斯带可能会发生在引伸计的标距之外。当出现这种情况时,采用引伸计测量的应变会减小,但实际上试样整个平行段的应变是增加的。
方法A2 横梁位移控制
方法A2适合于所有的材料类型,并且大多数的机器配置都能够实现闭环的恒定横梁位移速率。因此,对实验室及操作人员的要求要简单得多,尤其是当前使用是未升级的旧设备。但是,恒定的横梁位移速率通常会使测试变慢。为了解决这一问题,ISO 6892-1:2016允许在应力达到50%的规定屈服强度(Rp)前,可以采用任意的试验速率,因为在弹性区域,金属通常不具有应变速率敏感性。
对于每一种材料类型和不同的横截面,保持在±20%公差范围内所需的准确的横梁位移速率可能不同。为了符合标准,当试样类型改变时,可能需要对速率进行微调。系统柔度意味着应变速率降低,而非增加。因此,如果使用的速率比目标速率要高,但仍然在±20%的范围内,则有可能是柔度较高。换言之,如果根据0.0003 mm/mm/s(±20%公差的上限)计算,达到0.00025 mm/mm/s ±20%,则可能符合该标准。
英斯特朗的解决方案
英斯特朗试验机能够满足ISO6892-1:2016:基于应变速率控制方法A1、基于恒定横梁位移速率的方法A2,和基于应力速率控制的方法B。
我们的电子万能材料试验机或静态液压试验机可以配备各种夹持式或高分辨率自动引伸计,以实现应变速率控制。英斯特朗也拥有诸多试样夹持解决方案,可以为绝大部分材料类型提供合适的夹具。先进的5900电子万能材料试验机具有5kHz的环路更新率,和自适应应变控制,确保了各种条件下的稳定和准确的应变控制。
方法A1
无屈服点的材料
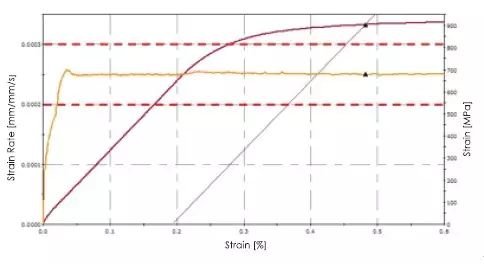
图5 Bluehill3 应力/应变曲线,添加了一个应变速率的y轴,显示20%的公差。
图5是采用英斯特朗5900系列试验机测试得到的曲线,这是一个典型的无明显屈服点试样的测试曲线,即连续屈服行为。构造线显示了ISO 6892-1典型计算点的测定位置,包括Rp0.2和Rm。在Bluehill® 3几乎所有的计算中,都可以显示构造线或标记,这样可以简单快速地看到计算的正确结果。
ISO 6892-1详细说明了在计算某些材料性能时,测试速率必须在±20%的误差范围内。总共有四个速率范围,并提供了在各测试点使用哪个范围的建议。图5的重点在测试曲线的屈服区域。橙色线表明应变速率在±20%误差范围内保持良好(公差用红色虚线表示)。
呈现明显屈服点的材料
图6 不连续屈服材料的 Bluehill 3应力/应变曲线
图6是具有明显屈服点的试样的典型曲线,即不连续屈服行为。构造线显示了ISO 6892-1典型计算点的测定位置,包括ReH和ReL。
不连续屈服材料在ReH前发生弹性变形。达到ReH后,随着应变继续增加,力通常会急剧下降,局部屈服可能会发生在引伸计标距之外。如果试验机仍然处于应变控制阶段,针对该屈服特征的结果,测试速率会急剧变化,从而导致应变速率错误,且不符合标准。英斯特朗设备采用智能算法切换到位移控制,使得可以在整个不连续屈服区域内保持标准定义的估计应变速率。在屈服区域结束,应变硬化开始时,机器切换至最终的速率,并且保持这种速率直至测试结束。
方法B 应力控制
ISO 6892-1:2016中规定的应力速率如图7所示,与ISO 6892-1:2009方法B中的速率相同,包括基于材料弹性模量的两个允许范围。
图7 ISO 6892-1:2016方法B速率
ISO 6892-1:2016中方法B的主要变化在于针对保持方法B或应力速率的测试模块,添加了注意事项。当材料屈服时,“应力速率”会下降,甚至变成负数(不连续屈服材料)。在闭环应力或载荷控制中保持应力速率会导致机器在屈服期间急剧加速。这不符合ISO 6892-1的要求,这会导致屈服强度过高,且测试时间过短。对于不连续屈服材料,甚至可能导致上屈服点被隐藏。
当使用能够进行闭环载荷/应力控制的试验机时,应在弹性阶段内达到应力速率,并且在达到预计Rp0.2的80%以前,应切换该应力速率,以便保持恒定横梁位移速率。在金属测试的弹性阶段,载荷应成比例。一旦处于稳定的闭环应力控制下,在整个剩余的的弹性阶段内,恒定横梁位移速率将达到规定应力速率,并且适用于测定屈服。
方法B仍然为行业中最常用的控制模式,但速率有较大差异,这意味着当根据方法B进行测试时,结果会有一些固有差异。采用不同的机器配置,差异会进一步扩大。
图8 连续和不连续屈服材料的应力控制范围
参考文献
国际标准化组织,金属材料-拉伸试验-第1部分:室温试验方法,ISO 6892-1:2009,国际标准化组织,日内瓦。
免责声明
本文件依据最新发布的国际试验标准编制,结合了各标准以及英斯特朗的应用知识。如果该标准出现任何错误或变化,英斯特朗不承担任何责任。但是,在适当情况下,我们将尽力维护本文件。建议您自行阅读该标准的官方和现行副本,以确保符合本标准
关于英斯特朗
英斯特朗是全球领先的材料和结构测试试验机制造商,从基本的软组织到先进的高强度合金材料,其产品被广泛运用于测试各种材料、组件和结构在不同环境下的力学性能和特性。英斯特朗可提供包括拉伸,压缩,疲劳,冲击,扭转,循环,多轴和流变等测试解决方案。
英斯特朗以成为公认的力学性能测试设备世界领导者为使命,通过提供最高品质的产品,专业的技术支持和世界水平的服务,从而使用户获得拥有英斯特朗产品的最佳体验。英斯特朗坚持参与全球ASTM和ISO标准委员会,以及时获得行业内对我们客户有影响的相关测试标准的第一手消息。
一键关注,助你成为测试专家!!
英斯特朗官方微信:英斯特朗
英斯特朗官方微博:@英斯特朗中国
英斯特朗中国官方网站:www.instron.cn
英斯特朗热线电话:400 820 2006
07-01 欧美克仪器
【仪器百科】LS-909丨干湿二合一激光粒度分析仪07-01 欧美克仪器
标准物质解决方案 | PFASs(全氟及多氟化合物)06-29
第九期阿尔塔有约 | 环境专题【新污染物:PFAS】技术研讨会精彩回顾及提问解答06-29
“绿色技术范式”,分析化学未来发展方向——访中国分析测试协会副理事长、辽宁省分析科学研究院原院长刘成雁教授06-29 转载仪器信息网
华西医院-标准型数显脑立体定位仪、双通道体温维持仪、体式显微镜安装完成06-29 迈越生物
科鉴检测助力2家仪器企业获得首批产品可靠性认证证书06-28 科鉴检测
德国耶拿:锂电池生命周期分析解决方案06-28 德国耶拿
AI已来!生命科学本科教学如何紧跟技术浪潮06-28 Opentrons
盛瀚售后,五星级服务的秘诀是什么?06-28 SHINE
专为汽车制造商打造的柔性解决方案——实现制程控制06-28
西北工业大学-脑立体定位仪安装完成06-28 迈越生物
会议邀请 | 第九届海上检验医师论坛06-28
卓立要闻 | 创新发展ing…6月卓立“大事小情”速览06-28 光电行业都会关注
打造信任合作伙伴!2024年度卓立汉光客户满意度调查开启06-28 光电行业都会关注
如何挑选适用于三阶光学非线性的测量系统?Z扫描测量系统来助力!06-28 光电行业都会关注
招聘启事—中国科学院沈阳自动化研究所微纳光学测量表征技术课题组06-28 光电行业都会关注
谱育科技作为主要完成方 荣获2023年度国家科学技术进步一等奖和二等奖06-28 点击关注→
仪器原理丨顶空仪与吹扫捕集仪科普小知识06-28 天美色谱
精准测量, 安杰智造:气相分子吸收光谱仪校准规范发布06-27