
诚信认证:
工商注册信息已核实! 扫一扫即可访问手机版展台
扫一扫即可访问手机版展台
应用案例|基于多光谱影像的小麦叶绿素含量及产量定量反演研究
一.前言
小麦作为世界三大粮食作物之一,是全球40%人口的主食来源。小麦作为我国主要的粮食作物之一,种植范围十分广泛。专用品种小麦的生长状况对我国国民经济发展方面有着重要的作用,因此对小麦长势进行高效、无损地监测,对小麦产量进行及时、准确地预测变得尤为重要。
二.技术思路与主要内容
奥谱天成利用全国产化的多光谱成像仪,以十个不同品种的小麦为研究对象,一方面利用多光谱相机采集的小麦扬花早、晚期的影像数据,利用影像计算的植被指数构建不同相机下的小麦扬花早期和晚期的叶绿素反演模型;另一方面利用无人机多光谱获取小麦灌浆中期高分辨率影像,基于颜色特征和植被指数构建小麦灌浆中期的叶绿素和小麦产量反演模型。
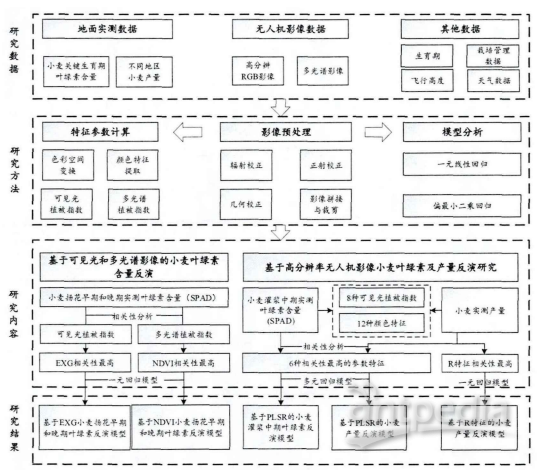
图1 总体技术路线
需实现内容:
1)多光谱影像预处理:利用多光谱采集小麦田间可见光和多光谱影像时,为保证后续图像处理的统一性,需要人为提前设置好曝光时间、光圈等参数。采集影像后为方便后续实验定量化的使用,对获取影像数据需要进行辐射校正、影响拼接、正射校正、几何校正和影像裁剪等预处理操作。
2)基于可见光和多光谱影像的小麦叶绿素含量反演:以10个不同品种小麦为研究对象,利用可见光和多光谱相机获取小麦扬花早、晚期的影像数据。通过实测的小麦叶绿素含量与两种影像计算多种植被指数的相关性分析,选取反演小麦叶绿素含量**的植被指数。最后基于选取的植被指数建立了不同相机下小麦扬花期和晚期的叶绿素含量反演模型。
3)基于高分辨率无人机影像的小麦叶绿素及产量反演:利用无人机搭载的多光谱相机获取小麦灌浆中期的影像数据。引入偏最小二乘算法,筛选出与实测参数相关性最高的多个特征作为自变量,分别构建小麦灌浆中期叶绿素和小麦产量反演模型。
4)无人搭载的多光谱相机飞行一个月一次,基于长时间序列的监测影像数据,从而对精准监控提供参考依据。
技术要点
多光谱影像预处理
由于受到传感器自身特性、天气等多种因素的限制,在数据获取过程中难免会产生误差,这些误差不仅会降低影像数据的质量,也会影响后续影响分析的精度。因此,在进行多光谱遥感影像分析之前,需要对原始影像进行预处理操作。影像数据预处理流程图如图2所示。

图2 影像数据预处理流程图
(1)辐射校正:无人机在飞行过程中,因光线及天气情况的不同,获取的影像在光谱维上会产生畸变。为保证后续影像拼接任务顺利完成, 需要对数据进行辐射校正。本文中可见光影像辐射校正采用的是伪 标准地物法——白板法,通过地面目标测得的反射率将影像的值转换为图像反射率,够较真实的反映地表反射率,从而达到试验的要求和目的。多光谱影像辐射校正是使用奥谱天成多光谱成像仪自带的数据处理软件来完成的。
(2)正射校正:无人机在采集影像数据时,受自然风的影响机身不可避免地会出现抖动、倾斜等情况、同时相机镜头也会因飞行姿态变化而引起投影变形,因此有必要对影像进行正射校正。正射校正是基于纠正变换函数将原始影像的像元逐个变换到校正影像的坐标系中。其处理流程如图3所示。

图3 无人机影像正射校正处理流程
(3)几何校正:由于无人机自带的定位系统精度有限,加之飞行过程中容易受到空中气流、风速和风向等外界因素的影响,导致获取影像的地理坐标与实际坐标存在误差,因此需要通过地面控制点高精度定位系统的坐标数据对航拍影响做几何校正。
偏最小二乘回归
在实际问题中,经常遇到需要研究两组多重相关变量间的相互依赖关系,并研究用一组变量(自变量或预测变量)去预测另一组变量(因变量或响应变量),除了最小二乘准则下的经典多元线性回归分析(MLR),提取自变量组分成分的主成分回归分析(PCR)等方法外,还有近年来发展起来的偏最小二乘(PLS)回归方法。
偏最小二乘回归提供一种多对多线性回归建模的方法,特别当两组变量的个数很多,且都存在多重相关性,而观测数据的数量(样本量)又较少时,用偏最小二乘回归建立的模型具有传统的经典回归分析等方法所没有的优点。偏最小二乘回归分析在建模过程中集中了主成分分析,典型相关分析和线性回归分析方法的特点,因此在分析结果中,除了可以提供一个更为合理的回归模型外,还可以 同时完成一些类似于主成分分析和典型相关分析的研究内容,提供更丰富、深入的一些信息。
植被各类指数计算公式
表1 植被指数计算公式
英文简称 | 植被指数名称 | 计算公式 |
GI | 绿度指数 | R544/R677 |
SIPI | 结构不敏感植被指数 | (R800-R445)/(R800-R680) |
NPCI | 归一化总色素叶绿素指数 | (R680-R430)/(R680+R430) |
MSR | 修正简单植被指数 | (R800/R670- 1)/(R800/R670+l)^1/2 |
NRI | 氮反射率指数 | (R570-R670)/(R570+R670) |
PRI | 光化学反射指数 | (R570-R531)/(R570+R531) |
TCARI | 转换型叶绿素指数 | 3*[(R700-R670)-0.2*(R700-R550)*(R700/R670)] |
PSRI | 植被衰减指数 | (R800-R445)/(R800-R680) |
PHRI | 生理反射指数 | (R550-R531)/(R550+R531) |
ARI | 花青素反射指数 | (R550)^(- 1)-(R700)^(-1) |
TVI | 三角植被指数 | 0.5*[120*(R750-R550)-200*(R670-R550)] |
RVSI | 红边植被胁迫指数 | [(R712+R752)/2]-R732 |
MCARI | 调节型叶绿素吸收比率指数 | [(R701-R671)-0.2*(R701-R549)]/(R701/R671) |
AR VI | 抗大气植被指数 | R800-(2*R700-R436)]/[R800+2*R700-R436) |
DVI | 差值植被指数 | R800-R700 |
EVI | 增强型植被指数 | 2*(R800-R700)/(R800+6*R700-7.5*R436+1) |
GNDVI | 绿度归一化植被指数 | (R546-R700)/(R546+R700) |
LMI | 叶片湿度指数 | R1650/R830 |
OSAVI | **化土壤调节植被指数 | [(R800-R700)/(R800+R700+0.16)]*(1+0.16) |
NDVI | 归一化差值植被指数 | (R800-R700)/(R800+R700) |
RVI | 比值植被指数 | R800/R700 |
SAVI | 土壤调节植被指数 | 1.5*(R800-R700)/(R800+R700+0.5) |
SLAVI | 特殊叶面积植被指数 | R800/(R700+R800) |
VARI | 可见光抗大气指数 | (R546-R700)/(R546+R700-R436) |
YI | 黄度指数 | (R580-2*R630+R680)/2500 |
WBI | 水波段指数 | R950/R900 |
四.方案实施
4.1多光谱无人机飞行服务
多光谱成像是指同时能够获取多个光谱波段(通常大于等于3个),并在可见光的基础上向红外光和紫外光两个方向扩展的光谱探测技术。常见实现方法是通过各种滤光片或分光器与数字图像传感器的组合,使其在同一时刻分别接收同一目标在不同窄光谱波段范围内辐射或反射的光信号,得到目标在几张不同光谱带的照片。多光谱图像是由成像光谱仪获取的,多光谱成像仪是一种能够同时获取光谱特征和空间图像信息的设备,是光电成像系统发展的重要方向。多光谱成像系统可提供具有3至20个非连续波段的图像,并已在农业和食品领域得到广泛应用。从成像原理上来讲,多光谱成像技术就是把入射的全波段或宽波段的光信号分成若干个窄波段的光束,然后把他们分别成像在相应的探测器上,从而获得不同光谱波段的图像。因此,利用多光谱特性可以将植被与非植被分离,并且与无人机进行结合,可以实现植被健康状态分析。
无人机多光谱具有以下特点:
采集速度快。多光谱因其采集的波段相对较少,故采集速度相对较快;
复杂性低。由于波段数量的限制,多光谱复杂性较低,更容易理解和应用,处理工作相对较少。
数据量丰富。随着波段数的增加,数据量呈指数增加。可提供空间域信息和光谱域信息,即“图谱合一”,并且由成像光谱仪得到的光谱曲线可以与地面实测的同类地物光谱曲线相类比。
在规划的研究区域,根据需求采集高光谱影像。具体步骤如下:
无人机端设置:组装无人机高光谱设备,设置航高、航速,根据相机参数和影像重叠度需求设置影像航线间距;
相机端设置:根据航高航速设置相机帧率,根据白板测量值设置积分时间(曝光时间);
标准反射率白板:在航线区域摆放标准反射率白板,采集影像时需拍摄到白板。

图8 无人机高光谱数据采集示意图
4.2无人机高光谱图像处理
无人机高光谱影像数据采集后,需要进行以下预处理工作:
波长定标:采集的原始影像没有波长信息,需要添加波长定标文件;
影像裁剪:高光谱采用推扫式成像,需要对采集的测区影像进行裁剪;
配准拼接:对裁剪后的测区影像进行地理配准或相对配准,之后对配准后的影像拼接成完整影像;
辐射校正:原始影像中的值代表反射强度,需要利用白板反射值和标准反射率进行校正,计算整个影像的反射率。
混合光谱分解:无人机采集的光谱数据受空间分辨率影像,导致一个像元中可能由不同地物或者植被混合平均而成,为提高精度,需要对影像进行混合光谱分解操作;
(6)光谱滤波(平滑):原始影像中的光谱信息存在一定的噪声,在应用之前需要进行光谱滤波。
光谱图像处理软件界面:
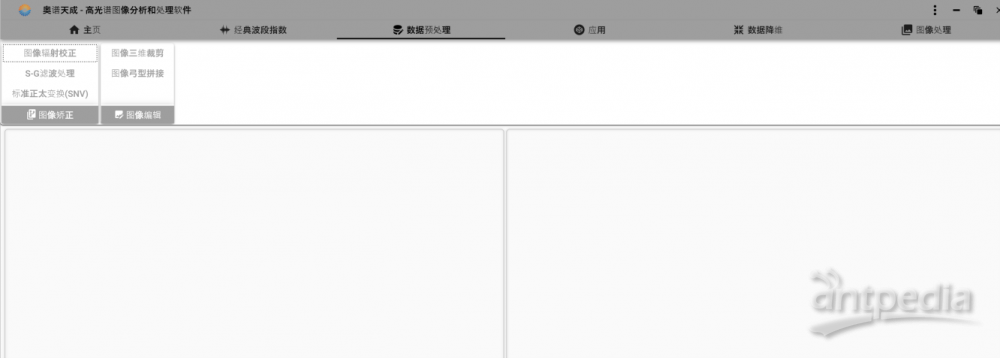
图9 无人机高光谱图像处理软件界面示意图
4.3地物样本数据采集
奥谱天成利用全国产化的高光谱成像仪和地物光谱仪在实地开展现场调查,目的是为无人机遥感图像的分类提供现场分类模型真实训练样本和分类结果的检验样本。现场调查的主要内容是测量感染穗颈瘟的水稻光谱数据,将地物光谱仪采集到的所有穗颈瘟水稻光谱数据进行不同感染程度的等级划分,作为无人机高光谱影像数据处理的标准训练样本数据集。

4.4结果分析
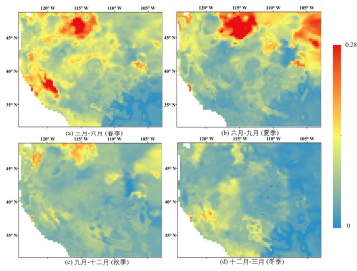
图12 植被含水量反演结果
4.4.1估算结果可靠性
模型精度检验可以根据均方跟误差(Root Mean Square Error, RMSE)和相关系数(r)两个指标来进行分析。

式中,n为样本数,为样本i的实验室测定值,为所有验证样本的平均值;为利用模型预测值,为所有对应验证样本的预测值的平均值。RMSE值越小,R相关系数值越大,说明模型精度越高。
4.4.2估算精度影响因素
影响反演结果精度的因素主要包含以下几个方面:
1. 光谱数据:受外业数据采集时的环境影响和不确定性的人为操作影响,导致拍摄的高光谱影像质量存在一定的差异。但该因素不是主要因素。
2. 实测数据:实测数据包含叶片的光谱数据和参数定量测量数据。受仪器设备和人为操作因素等的影响,这两种实测数据可能会存在一定误差,但对反演结果的影响较小。重要的是,在测量这两种实测值时的时间差是影像反演模型的主要因素之一。尽量避免叶片采摘后长时间再测量,并保证光谱测量和参数定量测量同时进行。
3. 反演模型:反演模型的构建是影响反演精度的主要因素。受特征光谱的选择、变量的形式以及反演模型的形式等的影响,导致反演结果存在很大的不确定性。
