


光镊——自由式激光陷阱,包括沿任意曲线的高强度和相位梯度力,能够限制多个粒子并驱动它们的运动,从而加快或减慢它们的速度。 本文首次根据我们的知识报告如何在样品深处实验性地创建这样的陷阱,以构建旋转胶体马达并研究不同配置的粒子动力学。 这种新型激光工具为微尺度的水动力学和光流体力学研究开辟了广阔的前景。
微观科学,纳米科学和技术中的许多应用需要捕获和操纵介电胶体颗粒。 这些粒子的受控运动引起适合于研究流体动力学微系统和微流变学的流体流动。 例如,旋转电介质颗粒的胶体电机可用于微流体中的局部混合,以及用于分析微观物体和复杂微系统之间的流体动力学相互作用,例如布朗棘轮。 在过去的几十年中,通过聚焦具有高数值孔径(NA> 1)显微镜物镜的激光束产生的光学陷阱已经被证明是这些应用的必要工具。 数字全息技术用于激光束整形和粒子跟踪已经彻底改变了微尺度和纳米级粒子操纵,力和位置测量。 特别是全息生成的激光涡旋光束能够在被捕获的粒子上施加扭矩允许创建光学驱动的微泵。 然而,高斯涡旋陷阱呈环状或其他形状[6由于其轴向强度梯度较弱而具有重要的局限性,其不能补偿光散射力。 这个事实解释了为什么高斯涡旋陷阱仅限制推动盖玻片玻璃的粒子,该玻璃作用于样品室或另一个介质界面(例如,水 - 空气)。 还可以通过使用快速时间控制来执行三维(3D)多粒子操纵由计算机生成的全息图生成的多个斑点状陷阱。 该方法非常适用于结构的组装和单个粒子控制,但不适用于多粒子动力学的研究。 此外,它需要高速计算和空间光调制器(SLM)。 其他运输多颗粒的建议利用了Bessel的特定特征和艾里梁,但实现的粒子轨迹是固定的。
真正的3D涡流陷阱能够在没有腔室壁的帮助下限制一个或多个颗粒并将它们围绕环移动使用聚焦的螺旋贝塞尔光束创建。 具体而言,与高斯涡旋相比,该光束的高强度梯度(HIG)允许3D俘获,而由涡旋产生的相位梯度力驱动粒子沿着环运动。 HIG和相位梯度力对于构建能够移动多个粒子甚至抵抗光辐射压力的3D激光陷阱至关重要。 这是三维曲面陷阱设计的关键点,在某些区域,光束传播方向和粒子运动方向相反。 此外,在所提及的应用中,尺寸通常在200-1000nm范围内的颗粒必须被深深地捕获在样品内,远离室壁足够远,以避免由于近端壁效应引起的不希望的流体动力学扰动。 这是特别难以实现的,因为使用高NA透镜的稳定捕获通常限制在距离腔室底部表面几微米的位置。 另一个具有挑战性的问题是创建单光束自由式陷阱 - 其形状和驱动力可以适应特定任务 - 能够以受控方式在3D中移动这样的小粒子。 它们的HIG和相位梯度必须沿曲线独立规定,以便在不改变陷阱形状和尺寸的情况下加速或减慢粒子运动。
在本文中,我们演示了如何使用全息技术用于3D光束整形,以创建满足上述要求的自由式光陷阱。 我们通过实验验证这些陷阱的能力 - 以环形,三角形,方形和3D曲线的形式,包括环形螺旋形 - 用于运动控制样品 内深达25μm的1μm介电粒子。 这些粒子足够小以预测纳米粒子的捕获,并且足够大以跟踪它们并且表征它们在3D陷阱中的流动。 我们发现几何形状与环不同的自由式陷阱有一个固有的非均匀相分布,解释了观察到的不均匀粒子运动。 这一事实和自由式陷阱的简单设计为集体粒子动力学的研究开辟了新的途径。
我们的光镊设置包括倒置显微镜,标准反射空间光调制器SLM(Holoeye PLUTO,像素尺寸为8μm)和高速sCMOS相机(Hamamatsu,Orca Flash 4.0,16位灰度,像素尺寸为6.5μm)。 为了产生俘获光束,寻址到SLM的仅相位全息图调制输入准直激光束(激光量子,Ventus,λ532nm,1.2 W),然后投射(使用1×开普勒望远镜)进入显微镜物镜的后孔(Olympus UPLSAPO,1.4 NA,100×,油浸), 最后,该镜头高度聚焦后一种光束(镜头输入功率为170 mW),在样品中产生3D陷阱,该样品包括分散在去离子水中的1μm二氧化硅颗粒(Bang Labs)。 将样品封闭在通过将玻璃盖玻片(厚度0.17mm)附着到标准显微镜载玻片上而制成的腔室中。 为了达到在样品深处捕获的能力,使用具有比标准(n = 1.51)更高折射率(n 1.56,Cargille Labs,A系列)的浸油。 见。 通过使用这种浸油,可以将捕集器刚度提高3倍,从而稳定地捕获样品中1微米深的介电粒子.
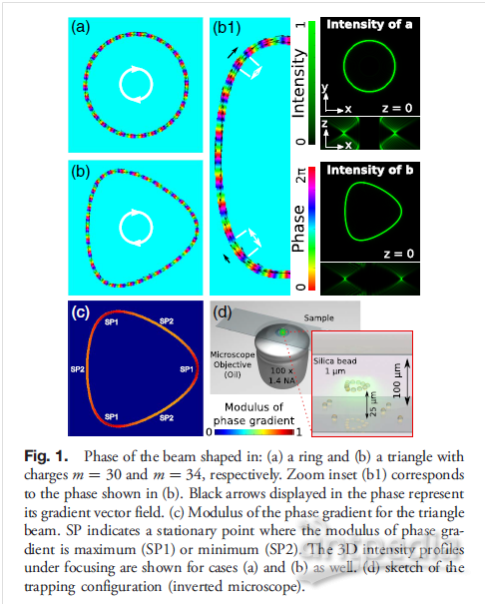
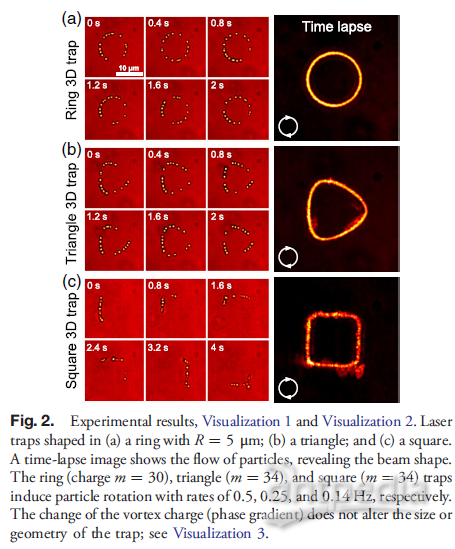
在环形陷阱的情况下,被困颗粒呈现均匀的顺时针旋转(见 图1),而在三角形的情况下(另见 图1)和方(见 图2如前所述,当接近拐角时,颗粒加速。 为了帮助光束 - 粒子相互作用的可视化,针对每种情况显示通过将所有记录的帧组合成单个图像而制成的延时组合物; 见图的右图 2。 这允许人们观察沿着弯曲梁的粒子流的强烈限制。 实际上,所有粒子都与曲线紧密配合,从而显示出俘获光束的形状。 在方形陷阱的情况下,由于它们之间的碰撞,一些颗粒最终会在拐角处逸出; 看图中的延时图像(在右下角)。 2(c) 和 可视化2。 如在观察中所见 可视化1 和 可视化2通过改变SLM中显示的全息图H rc3,捕获的粒子流可以在几何形状(保持几乎所有粒子)中从环切换到三角形并在几毫秒内变成正方形。 这一事实,以及切换运动方向(m> 0顺时针,m <0逆时针)的选项,以及增加粒子的旋转速率而不改变光束的大小和几何形状,强调了开发陷阱的多功能性。 为了说明颗粒的运动方向和可变转速的切换,一个m 15的环形陷阱(转速为保持环半径的0.3 Hz)和m 30(0.5 Hz的旋转速率)如 图3。 这些结果表明,多个小介电粒子可以被限制在不同的几何形状中并且通过可变相位梯度力来操纵。 而且,它远离室壁实现,因此避免了不希望的流体动力学效应。
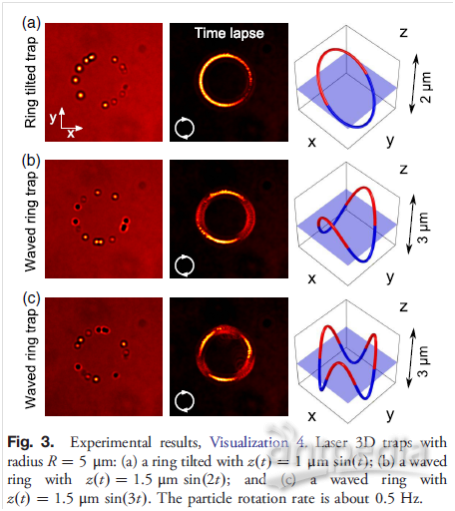
利用三维弯曲圈闭可以研究更多有趣的粒子动力学。在这种情况下,由于相位梯度的作用,被捕获的粒子向下游甚至上游移动,与激光源的光辐射压力相反——由于相位梯度。 这在不同的配置中观察到:倾斜的环形陷阱(图2)。 3(a))和波形环陷阱显示在图1和2中。 3(b) 和 3(c); 也可以看看 图4。 注意,如在延时流图像中观察到的,粒子的图像根据其相对于显微镜物镜的焦平面的3D位置而由于散焦而变化。 有趣的是,在所考虑的三个陷阱中,旋转速率(范围0.4-0.5Hz)是相似的,因此尽管存在多个上游运动,但是颗粒的平均速度仍然保持不变; 见图。 3 和 图4。 具体地,上游轨迹中的粒子运动比粒子加速的下游粒子运动慢,因此保持了陷阱中的粒子旋转速率。 光束的相位梯度重新定向部分辐射压力,以产生足够强的光学力,使粒子向上游移动,同时也加速粒子向下游运动。 这些结果强调了光辐射压力和驱动粒子运动的相位梯度之间的重要相互作用,而HIGs沿着3D曲线保持稳定的俘获。 此外,后面的例子说明了如何实时创建,控制和切换可重构拖拉机横梁; 看到 可视化4.
通过使用所提出的技术,可以创建在3D曲线几何中扩展的更复杂的粒子流。 例如,在图 4,考虑由嵌入环形表面的螺旋曲线形成的陷阱。 该环形3D陷阱的投影在x-y平面中具有海星形状,如图3中的延时流动图所示。 4。 与前面的例子一样,颗粒被很好地限制并沿着曲线顺时针旋转。 然而,当一些粒子沿着曲线移动时,其他粒子在顶部顶点保持准稳定平衡曲线(见图。 4),粒子经历力的平衡。 可视化5 显示一个从顶点1开始的粒子(见图。 4,时间0 s)然后在2 s内执行上下游运动后到达顶点2。 在这一点上,它推动另一个粒子,将其从准稳定平衡中释放出来。 该释放的粒子朝向顶点3和4,执行另一个上下游运动。 粒子流中的这种类似于billard的行为沿着整个陷阱延伸。 这些结果说明了自由式陷阱作为研究粒子间相互作用的工具所起的作用。
在我们所观察到的所有陷阱中,我们观察到单个被捕获的粒子沿着曲线行进的速度比多个被捕获粒子的情况慢。 例如,在环形陷阱中,单个粒子的旋转速率为0.2 Hz,而对于多个粒子,速率增加到0.5 Hz(可视化1)。 颗粒平均速度的增加是由包括流体动力学相互作用在内的集体效应引起的。 实际上,由相位梯度力驱动的被捕获的粒子具有由于流体动力学牵伸而推动并拉动相邻粒子的能力,这是在粘性流体(水)中移动的颗粒的胶体系统的特征。
自由式3D激光陷阱在设计能够限制和驱动多个粒子的光学力方面提供了重要的自由度,这在许多应用中是需要的。 例如,3D粒子运动非常适合于构造新一代旋转胶体马达,其引起不同几何形状的流体流动。 这些电动机可用于开发微流体工具或应用于浸没流体的流变学研究。 自由式陷阱也为设计布朗棘轮铺平了道路其中切换开和关状态的外力是沿着陷阱规定的相位梯度力。 此外,它们允许研究由光和流体动力学相互作用以及光学结合效应引起的多粒子动力学的重要方面。 光学力的设计及其对粒子的传输和组织的影响对于微图案生成也是有希望的。
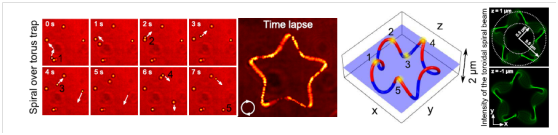
实验结果显示,光学感应粒子运动在三维螺旋激光陷阱。这张延时图像显示了粒子流动,显示出海星的形状,这与捕获光束的形状非常吻合(右图)。三维扭转螺旋曲线的上角和下角分别用红色和蓝色表示。